Timoshenko Beam #
elastica.modules用于构建不同的仿真系统
import numpy as np
# Import modules
from elastica.modules import BaseSystemCollection, Constraints, Forcing, Damping
# Import Cosserat Rod Class
from elastica.rod.cosserat_rod import CosseratRod
# Import Damping Class
from elastica.dissipation import AnalyticalLinearDamper
# Import Boundary Condition Classes
from elastica.boundary_conditions import OneEndFixedRod, FreeRod
from elastica.external_forces import EndpointForces
# Import Timestepping Functions
from elastica.timestepper.symplectic_steppers import PositionVerlet
from elastica.timestepper import integrate
在这个例子中,杆的一端被固定住,令另一端受力。
class TimoshenkoBeamSimulator(BaseSystemCollection, Constraints, Forcing, Damping):
pass
timoshenko_sim = TimoshenkoBeamSimulator()
接下来,定义这个杆的各项属性,包括材料、几何形状等。
# setting up test params
# rod 中单元体 elements 的数量
n_elem = 100
density = 1000
nu = 1e-4
E = 1e6 # 弹性模量
# For shear modulus of 1e4, nu is 99!
# 泊松比,一般不超过0.5,这里是为了让变形更明显
poisson_ratio = 99
shear_modulus = E / (poisson_ratio + 1.0) # 剪切系数
# 三维空间中的起始坐标
start = np.zeros((3,))
# rod 的朝向
direction = np.array([0.0, 0.0, 1.0])
normal = np.array([0.0, 1.0, 0.0])
base_length = 3.0
base_radius = 0.25
base_area = np.pi * base_radius ** 2
我们根据上述的参数构建出一根 rod,然后把它加入到一开始创建的仿真系统中
shearable_rod = CosseratRod.straight_rod(
n_elem,
start,
direction,
normal,
base_length,
base_radius,
density,
0.0, # internal damping constant, deprecated in v0.3.0
E,
shear_modulus=shear_modulus,
)
timoshenko_sim.append(shearable_rod)
添加阻尼 #
We also need to define damping_constant and simulation time_step and pass in .using() method.
dl = base_length / n_elem
dt = 0.01 * dl
timoshenko_sim.dampen(shearable_rod).using(
AnalyticalLinearDamper,
damping_constant=nu,
time_step=dt,
)
添加边界条件 #
第一个约束是,固定杆一端的位置。We do this using the .constrain()option and theOneEndFixedRodboundary condition. We are modifying thetimoshenko_simsimulator toconstraintheshearable_rodobject using theOneEndFixedRod type of constraint.
我们还要定义杆的哪一个节点需要被约束.,可以通过节点的索引 constrained_position_idx来实现,这里我们固定了第一个节点。为了防止杆绕固定节点旋转, 我们需要在两个节点之间约束一个元素,这固定了杆的方向. 我们通过约束元素的索引 constrained_director_idx来实现。例如对于 position, 我们约束杆的第一个元素. Together, this contrains the position and orientation of the rod at the origin.
timoshenko_sim.constrain(shearable_rod).using(
OneEndFixedRod, constrained_position_idx=(0,), constrained_director_idx=(0,)
)
print("One end of the rod is now fixed in place")
第二个约束是对杆的末端施加一个力。我们想在d1方向施加一个负的力,同时加到杆的末端,可以通过指定origin_force 和end_force 实现。我们还想随着时间逐渐提高力的大小,通过指定ramp_up_time来改变,这防止了因力的不连续导致的错误。
origin_force = np.array([0.0, 0.0, 0.0])
end_force = np.array([-10.0, 0.0, 0.0])
ramp_up_time = 5.0
timoshenko_sim.add_forcing_to(shearable_rod).using(
EndpointForces, origin_force, end_force, ramp_up_time=ramp_up_time
)
print("Forces added to the rod")
添加 Unshearable Rod #
为了比较 shearable rod 和 unshearable rod,我们再添加一个unshearable rod。我们改变 rod 的泊松比来让它 unshearable。对于真实的unshearable rod,泊松比通常为 -1.0,然而这会导致系统数值不稳定,所以我们采用 -0.85 的泊松比。
# Start into the plane
unshearable_start = np.array([0.0, -1.0, 0.0])
unshearable_rod = CosseratRod.straight_rod(
n_elem,
unshearable_start,
direction,
normal,
base_length,
base_radius,
density,
0.0, # internal damping constant, deprecated in v0.3.0
E,
# Unshearable rod needs G -> inf, which is achievable with a poisson ratio of -1.0
shear_modulus=E / (-0.85 + 1.0),
)
timoshenko_sim.append(unshearable_rod)
timoshenko_sim.dampen(unshearable_rod).using(
AnalyticalLinearDamper,
damping_constant=nu,
time_step=dt,
)
timoshenko_sim.constrain(unshearable_rod).using(
OneEndFixedRod, constrained_position_idx=(0,), constrained_director_idx=(0,)
)
timoshenko_sim.add_forcing_to(unshearable_rod).using(
EndpointForces, origin_force, end_force, ramp_up_time=ramp_up_time
)
print("Unshearable rod set up")
系统结束 #
现在我们以及添加完需要的rods及其边界条件到我们的系统中。最后,我们需要结束这个系统。这个操作将遍历系统,重新排列事物,并预计算有用的数值,为系统进行仿真做好准备。
timoshenko_sim.finalize()
print("System finalized")
注意,如果在 finalize 后对 rod 做出了一些改变,需要 re-setup 该系统,即重新运行上述的所有代码。
定义仿真时间 #
我们还要决定该仿真的运行时间,以及使用哪种时间步长方法。默认方法是 PositionVerlet 算法。这里我们仿真10s。
final_time = 10.0
total_steps = int(final_time / dt)
print("Total steps to take", total_steps)
timestepper = PositionVerlet()
运行仿真 #
对于仿真的运行,我们结合 timoshenko_sim,使用 timestepper 方法,执行了 total_steps 步后,到达 final_time。
integrate(timestepper, timoshenko_sim, final_time, total_steps)
Post Processing Results #
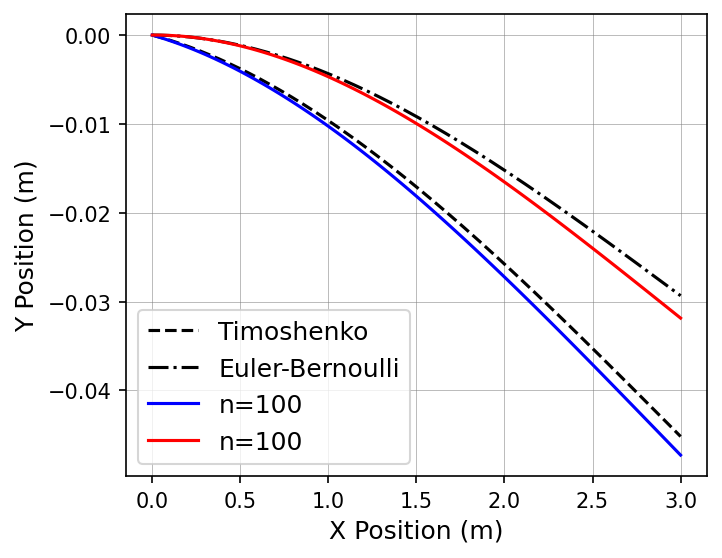
现在仿真已经结束,我们想处理仿真结果,我们将比较the solutions for the shearable and unshearable beams与analytical Timoshenko and Euler-Bernoulli beam results.
# Compute beam position for sherable and unsherable beams.
def analytical_result(arg_rod, arg_end_force, shearing=True, n_elem=500):
base_length = np.sum(arg_rod.rest_lengths)
# 在间隔 0.0 和 base_length 之间返回 n_elem 个均匀间隔的数据
# 即每个节点距离起始点的长度
arg_s = np.linspace(0.0, base_length, n_elem)
if type(arg_end_force) is np.ndarray:
acting_force = arg_end_force[np.nonzero(arg_end_force)]
else:
acting_force = arg_end_force
acting_force = np.abs(acting_force)
linear_prefactor = -acting_force / arg_rod.shear_matrix[0, 0, 0]
quadratic_prefactor = (
-acting_force
/ 2.0
* np.sum(arg_rod.rest_lengths / arg_rod.bend_matrix[0, 0, 0])
)
cubic_prefactor = (acting_force / 6.0) / arg_rod.bend_matrix[0, 0, 0]
if shearing:
return (
arg_s,
arg_s * linear_prefactor
+ arg_s ** 2 * quadratic_prefactor
+ arg_s ** 3 * cubic_prefactor,
)
else:
return arg_s, arg_s ** 2 * quadratic_prefactor + arg_s ** 3 * cubic_prefactor
现在,我们想去画出结果。首先需要指出的是,如何接收杆的位置,它们位于rod.position_collection[dim, n_elem]。在本例中,我们画出 x- 和 z-轴。
def plot_timoshenko(shearable_rod, unshearable_rod, end_force):
import matplotlib.pyplot as plt
analytical_shearable_positon = analytical_result(
shearable_rod, end_force, shearing=True
)
analytical_unshearable_positon = analytical_result(
unshearable_rod, end_force, shearing=False
)
fig = plt.figure(figsize=(5, 4), frameon=True, dpi=150)
ax = fig.add_subplot(111)
ax.grid(b=True, which="major", color="grey", linestyle="-", linewidth=0.25)
ax.plot(
analytical_shearable_positon[0],
analytical_shearable_positon[1],
"k--",
label="Timoshenko",
)
ax.plot(
analytical_unshearable_positon[0],
analytical_unshearable_positon[1],
"k-.",
label="Euler-Bernoulli",
)
ax.plot(
shearable_rod.position_collection[2, :],
shearable_rod.position_collection[0, :],
"b-",
label="n=" + str(shearable_rod.n_elems),
)
ax.plot(
unshearable_rod.position_collection[2, :],
unshearable_rod.position_collection[0, :],
"r-",
label="n=" + str(unshearable_rod.n_elems),
)
ax.legend(prop={"size": 12})
ax.set_ylabel("Y Position (m)", fontsize=12)
ax.set_xlabel("X Position (m)", fontsize=12)
plt.show()
plot_timoshenko(shearable_rod, unshearable_rod, end_force)